Motivation und Zielsetzung
Die Ergebnisse der Eingangsbefundung für betriebsbeanspruchten Triebwerkkomponenten ist für alle weiteren Entscheidungen ausschlaggebend. Der Grad der Beschädigung bestimmt ob ein Bauteil repariert werden kann oder welcher Reparaturpfad am besten geeignet ist. Hierzu ist eine detaillierte Kenntnis des Ist-Zustands notwendig, die sowohl makroskopische Beschaffenheit wie die Form, als auch mikroskopische Strukturen wie die Oberflächenrauheiten und – mikrostrukturen umfasst.
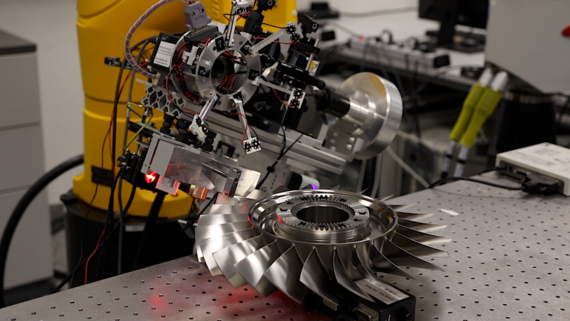
Aktuell wird der Befundungsprozess manuell durchgeführt und basiert auf Erfahrungswerten. Zur vollständigen Automatisierung des Regenerationsprozesses ist es deshalb notwendig diesen Schritt durch geeignete Messmethoden nachzubilden und zu erweitern. Herkömmliche Ein-Sensor-Systeme verfügen jedoch nicht über das erforderliche Spektrum an erfassbaren Skalenbereichen. Deshalb wird in Teilprojekt A2 ein robotergestütztes Multisensorsystem zur zerstörungsfreien Prüfung entwickelt. Ein 6-Achs-Industrieroboter dient hierbei der präzisen Positionierung der einzelnen Sensoren in ihrem Arbeitsbereich.
Die Daten der verschiedenen Sensoren werden miteinander fusioniert, damit ein ganzheitliches Modell des Messobjekts entsteht. Dieses Modell kann nun auf bestimmte Merkmale, wie Verschleißerscheinungen und Schäden, untersucht werden, welche ihrerseits charakterisiert und klassifiziert werden, um eine aussagekräftige Befundung zu gewährleisten.
Die gewonnenen Messdaten bilden die Grundlage für Simulationen anderer Teilprojekte und können für die Planung der Werkzeugpfade in bearbeitenden Prozessen genutzt werden.
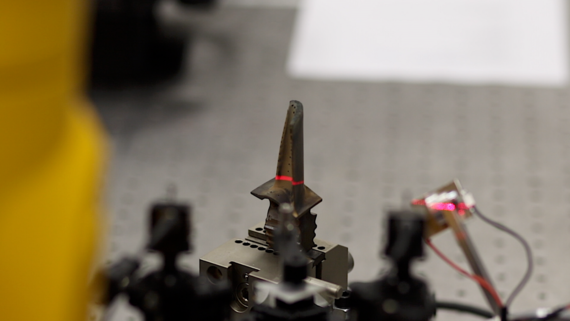
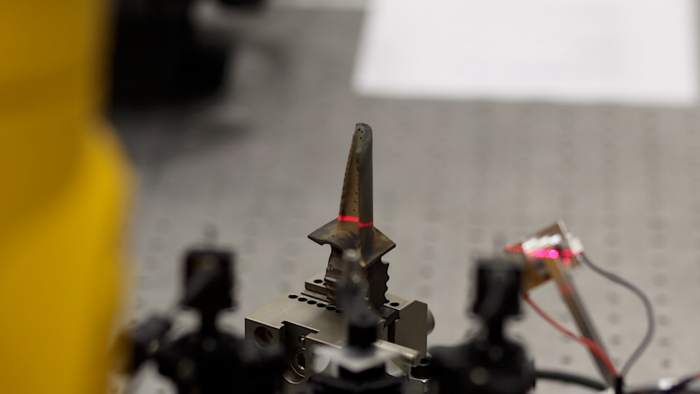
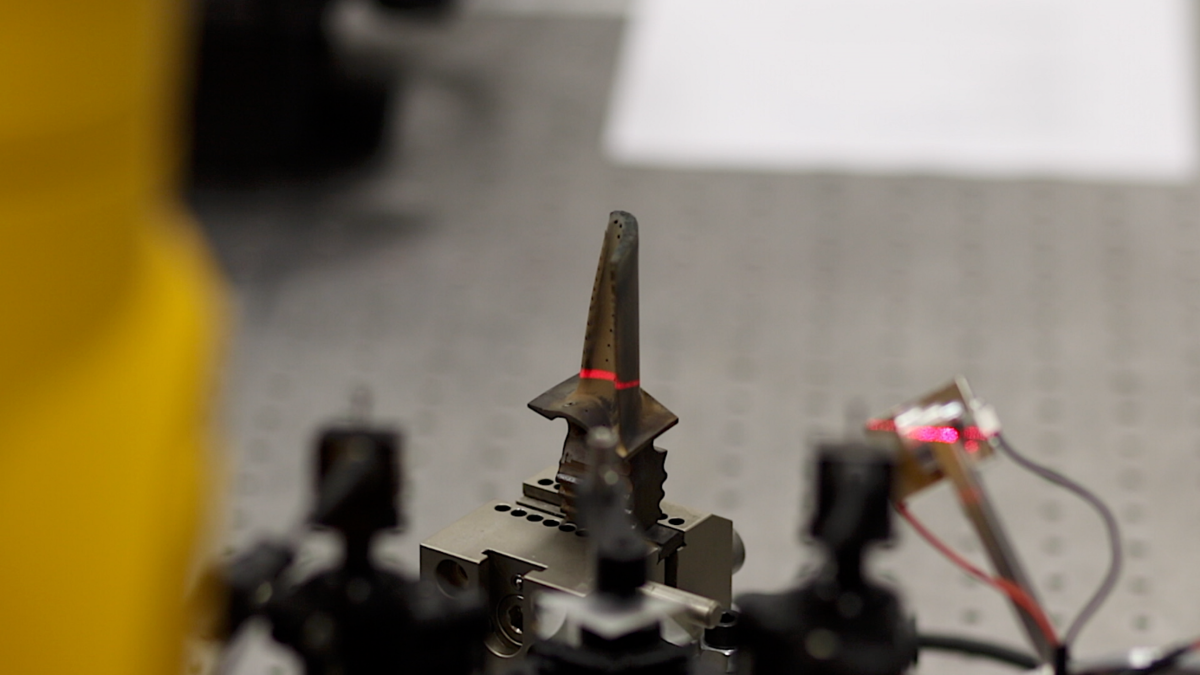
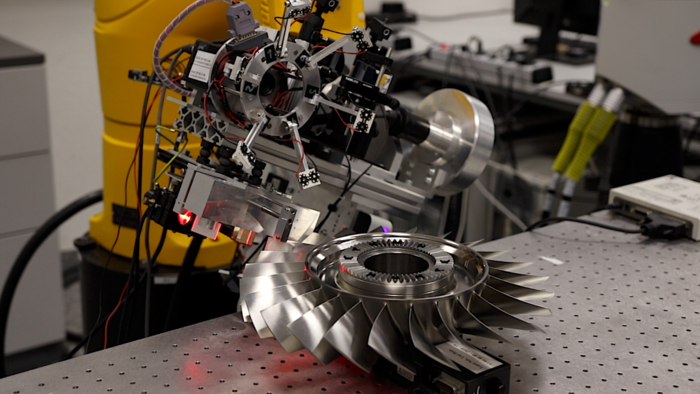
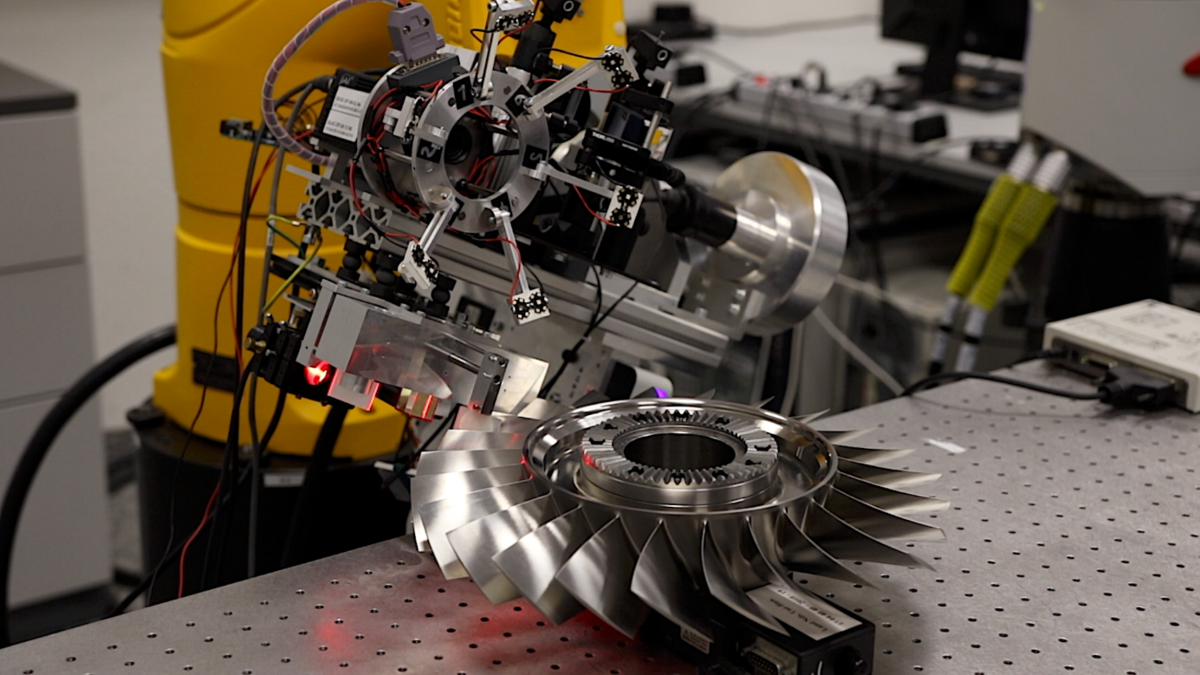
Video: Die Lage des Roboterendeffektors mit dem Multisensorsystem wird durch einen hochpräzisen Lasertracker bestimmt, dies ermöglicht später das Verknüpfen der einzelnen Messfelder miteinander. Gezeigt wird (in der Reihenfolge des Videos) das Streifenlichtprojektionsverfahren und die zusammengefügten Messfelder der Schaufel, der Kantensensor mit Polyview-Optik, den BRDF-Sensor zur Approximation der Bidirektionalen Reflektanzverteilungsfunktion sowie die Messung der Oberflächenmikrostruktur mit dem Low-Coherence-Interferometer mit Messarm an einer Blisk.
Ergebnisse
In den ersten Förderperioden wurden verschiedene Sensoren für den Einsatz am Roboter entwickelt. Jeder dieser Sensoren erfüllt hierbei seine eigene Aufgabe: Ein auf Streifenlichtprojektion basierendes System wird zur hochauflösenden Makroskopischen Erfassung der Geometrie genutzt. Zur genauen Erfassung von Kantenradien wurde ein Kantensensor mit einer Polyview Optik entwickelt. Die für die Strömungssimulation wichtigen Oberflächenrauheiten können durch ein Low-Coherence-Interferometer erfasst werden. Zur Erfassung nicht-geometrischer Eigenschaften wurde ein Sensor zur Approximation der bidirektionalen Reflektanzverteilungsfunktion entwickelt mit dem die Relexionseigenschaften der Oberfläche gemessen und so Oberflächenschäden wie beispielsweise Burnings detektiert werden können. Zur Registrierung der einzelnen Messungen wird ein Lasertracker genutzt, der die Lage des Endeffektors bestimmt.
Aktuelle Arbeiten und Ausblick
Aktuell beschäftigt sich das Teilprojekt mit der Messdatenfusion der einzelnen Modalitäten. Desweiteren werden Verfahren zur intelligenten, adaptiven Bahnplanung erforscht, sodass die geometrische Beschaffenheit des Objekts nicht bekannt sein muss und die Unsicherheiten in den Messergebnissen minimiert werden können. Basierend auf dem fusionierten Messdatensatz sollen Schäden detektiert, lokalisiert und charakterisiert werden können. Die Schäden können dann in einer Datenbank zusammengefasst werden und stehen den nachfolgenden Teilprozessen zur Planung zur Verfügung.
Verantwortliches Institut
Das Projekt wird verantwortet durch das Institut für Mess- und Regelungstechnik.
Teilprojektleiter
Mitarbeiter
30167 Hannover
30167 Hannover
Veröffentlichungen
Internationale wissenschaftliche Beiträge in Fachzeitschriften, begutachtet
-
(2017): Vibration-insensitive Low Coherence Interferometer (LCI) for the Measurement of Technical Surfaces, Measurement
DOI: 10.1016/j.measurement.2017.03.010 -
(2016): Turbine blade wear and damage – An overview of advanced characterization techniques, Materials Testing 58 (5), S. 389–394
DOI: 10.3139/120.110872 -
(2016): Multiscale measurement of air foils with data fusion of three optical inspection systems, In: CIRP Journal of Manufacturing Science and Technology 2016
DOI: 10.1016/j.cirpj.2016.07.006 -
(2016): Low-coherence interferometry based roughness measurement on turbine blade surfaces using wavelet analysis, In: Optics and Lasers in Engineering 82, S. 113–121
DOI: 10.1016/j.optlaseng.2016.02.011 -
(2015): High-precision surface measurement with an automated multiangle low coherence interferometer, Applied Optics 54 (6), S. 1232
DOI: 10.1364/AO.54.001232
Internationale Konferenzbeiträge, begutachtet
-
(2018): Near-Wing Multi-Sensor Diagnostics of Jet Engine Components, ASME Turbo Expo 2018: Turbomachinery Technical Conference and Exposition; Oslo, Norway, June 11–15, 2018
DOI: 10.1115/GT2018-76793 -
(2017): Advanced Characterization Techniques for Turbine Blade Wear and Damage, Procedia CIRP Bd. 59: ELSEVIER, S. 83–88
-
(2015): Development of a compact low coherence interferometer based on GPGPU for fast microscopic surface measurement on turbine blades, SPIE Optical Metrology 2015, Proc. SPIE 9525, Optical Measurement Systems for Industrial Inspection IX, 95250R (pp. 95250R-95250R), Munich
DOI: 10.1117/12.2184749 -
(2014): Multiscale Optical Inspection Systems for the Regeneration of Complex Capital Goods, Procedia CIRP. Proceedings of the 3rd International Conference in Through-life Engineering Services, Bd. 22: ELSEVIER, S. 243–248
Internationale Konferenzbeiträge, nicht begutachtet
-
(2016): Development of an edge sensor based on polyview optics and laser triangulation principle, In: International Society for Optics and Photonics (Hg.): SPIE/COS Photonics Asia (inproceedings) S. 100231
-
(2015): Compact Optical Sensor for the Measurement of Surface Microtopographies on Turbine Blades, AMA Conference 2015, Proceedings SENSOR 2015, Nürnberg, Germany
DOI: 10.5162/sensor2015/C6.3 -
(2013): Data quality estimation from interdependencies for structural light scanners, Tavares, João Manuel R. S. und Jorge, R. M. Natal (Hg.): Computational vision and medical image processing IV, S. 191–195
-
(2012): Multi-Scale Inspection of Worn Surfaces for Product Regeneration, MSC 2012, New Orleans: Spring 2013, S. 28–32
Nationale wissenschaftliche Beiträge in Fachzeitschriften, nicht begutachtet
-
(2011): 3D Messtechnik für Inspektion und In-Situ Überwachung, Ingenieurspiegel, S. 71–72
Nationale Konferenzbeiträge, nicht begutachtet
-
(2013): Assessment of used turbine blades on and beneath the surface for product regeneration. Generation of a damage model based on reflection, geometry measurement and thermography, CLEO 2013, 16.5.2013 München
-
(2011): Optimierung eines endoskopischen Streifenprojektionssystems, Spani Molella, Luca Spani (Hg.): Vierter Workshop Optische Technologien. Tagungsband ; 17 - 18 November 2010. Garbsen: PZH, Produktionstechn. Zentrum
Dissertationen
-
(2017): Multiscale and multimodal geometric measurement and data fusion technologies for robot guided surface metrology, Berichte aus dem IMR, PZH Verlag, Garbsen 2017
ISBN: 3959001487

